
CAN總線智能照明模塊停車場燈光控制系統中應用
CAN總線智能照明模塊停車場燈光控制系統中應用 來源:www.vietlogon.com
CAN(Controller Area Network——控制器局域網)CAN總線智能照明模塊停車場燈光控制系統中應用是一種有效支持分布式控制和實時控制的串行通信網絡,具有可靠性高、成本低、配置靈活、數據傳輸距離遠、數據傳輸速率快等優點,已經成為國際上應用最廣泛的現場總線之一。
目前大部分的地下停車場都需要大量的照明設備進行長期照明,采用傳統的連續照明方式或聲控照明方式很難實現照明的自動控制,且會造成巨大的能源浪費和設備損耗。國外雖然有類似的燈光智能控制系統,但價格很高,限制了它的廣泛應用。巨川電氣專業智能照明模塊,智能照明控制系統,路燈遠程控制系統!本文提出了一種基于CAN總線技術開發的分布式停車場燈光智能控制系統,能夠解決停車場內照明智能控制問題,降低停車場內的布線復雜度,減少安裝費用并大大延長停車場內照明設備的使用壽命,具有良好的應用前景。(你還在看達康書記嗎?趕緊來看巨川電氣智能照明模塊吧,自主創新技術!)
1 分布式停車場燈光智能控制系統的基本原理
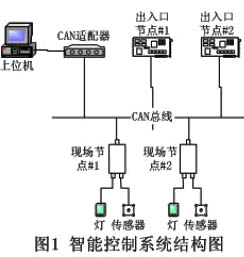
該智能控制系統的結構如圖1所示。系統主要由上位機、CAN適配器、控制節點(包括出入口控制節點和現場控制節點)等部分構成,各節點間通過CAN總線進行通信。
當有車輛進入停車場時,可以根據車牌號決定該車入庫時的行車路線及車位,根據預定的行車路線,選擇相應的照明控制方案。
各現場控制節點檢測各通道入口是否有車輛經過,當檢測到過往車輛時,控制器打開車輛附近相關的照明回路,同時通過CAN總線向網絡上的其他節點發布消息;其他節點根據接收到的消息以及事先預定的控制方案打開有關的照明回路。
在出入口的控制節點可以實時監測并顯示各個照明回路的開關狀態。同時出入口節點也可根據需要進行手工控制,實現對停車場內每一個回路的開關控制,以應付一些緊急事件。
為了讓系統能夠適應不同的使用環境,同時能夠根據用戶的需要隨時改變照明方案,該系統采用現場可編程技術,可由上位機通過CAN總線,將各個節點的控制方案下載到各控制節點,實現照明方案的現場編輯、現場修改及現場下載。
系統中智能照明模塊CAN適配器的作用是將CAN總線上的命令通過串口或USB口傳給上位機,也可以將上位機的命令轉換成CAN命令發送給系統中的其它節點。
2 系統硬件設計
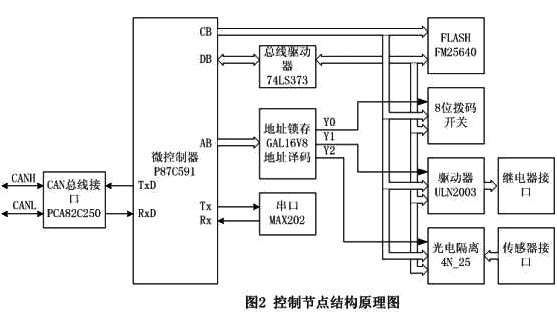
智能照明模塊控制節點按功能可以劃分為不同的類型,但是其基本的結構相同。控制節點的電路結構如圖2所示。主要由微控制器、CAN總線驅動器、外部存儲器、串行接口、電源部分等組成。
微控制器采用PHILIPS公司的P87C591,P87C591 是一個單片8 位高性能微控制器,具有片內CAN 控制器,它采用了 80C51 指令集并成功的包括了Philips 半導體SJA1000 CAN 控制器的Pelican 功能(該模式支持具有很多新特性的 CAN2.0B協議),同時該微控制器具有內置看門狗,內部程序存儲器為16K字節。采用該控制器可以大大簡化電路設計并節省應用空間。
外部存儲器的作用是存儲從上位機下載下來的控制方案。外部存儲器采用RAMTRON公司的FM25640。該芯片采用鐵電存儲技術,具有高速非易失的特性,采用SPI接口連接,容量是64K位。該芯片用于存儲節點間的控制方案,同時也可以當作系統的緩沖區。
智能照明模塊接口用于連接控制節點與照明回路,通過該接口控制節點可以控制照明設備的開關。
串行接口電路采用標準RS-232接口芯片——MAX202,使用該接口可以使節點在無需連接網絡的情況下也可以進行節點間互連關系的上傳和下載,同時也可以當作調試的接口。8位撥碼開關用于設定節點的邏輯地址,各個節點根據這個邏輯地址進行相互識別。
3 系統軟件設計
3.1 上位機管理軟件設計
上位機管理軟件實現的主要功能如下:
1) 系統控制方案的新建、修改、保存:用戶可以通過管理軟件建立并修改控制方案,或者將控制方案以文件形式保存,以備以后使用。
2) 系統控制方案的上傳、下載:管理軟件可以將網絡中各個節點的所存儲的控制方案上傳到上位機,也可以將控制方案通過CAN總線下載到各個節點中去。
3) 實時監測系統各個回路的狀態:系統通過CAN接口卡可以實時監測CAN總線上傳送的各種命令,并可以在上位機上顯示出各個回路的開關狀態。
4) 控制系統各回路的開關狀態:用戶可以通過管理軟件向系統中其它節點發送控制命令,控制系統中任意回路的開關。
上位機管理軟件采用組態技術和圖形化編輯界面,用戶可以通過組態方式或者通過表格方式建立、修改控制方案。管理軟件也通過圖形方式實時顯示系統中各個回路的狀態的。
3.2 控制節點的軟件設計
3.2.1 控制節點軟件實現功能
控制節點軟件實現的主要功能如下:
1) 系統的初始化:包括串口的初始化、CAN控制器的初始化、定時器的初始化以及系統主要變量的初始化。
2) 外部存儲器資源的分配、管理:包括對FM25640讀寫的基本操作,以及建立在這些操作上的對節點控制方案的管理。
3) CAN命令的發送、接收及解釋:包括對其它節點發送的CAN命令的接收、識別、解釋,以及相應的應答命令的發送。
4) 串口命令的發送、接收及解釋:包括串口命令的接收、識別、解釋,以及相應的應答命令的發送。
5) 傳感器信號的檢測:包括傳感器組的連續檢測,以及檢測到信號時所進行的相應處理。
6) 照明回路的控制。
7) 定時器的管理。
3.2.2 控制節點軟件工作流程
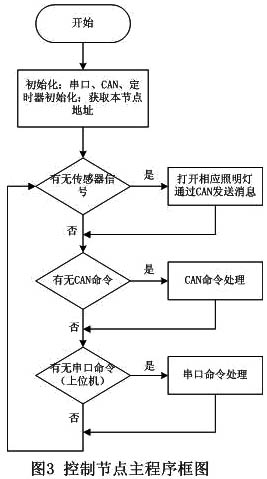
控制節點的程序采用C51設計,這樣可以大大簡化程序設計的復雜度。控制節點的主程序框圖如圖3所示。
在系統初始化后,程序循環查詢傳感器接口、串口和CAN接口。當檢測到傳感器有信號輸出時,程序在打開附近的照明回路的同時也通過CAN總線向其他節點發送該傳感器的信息。其余的控制節點一旦接收到該信息,便會查詢存儲在外部存儲器中的控制方案信息,然后打開與該傳感器相關聯的照明回路,從而實現控制方案指定的照明方式。
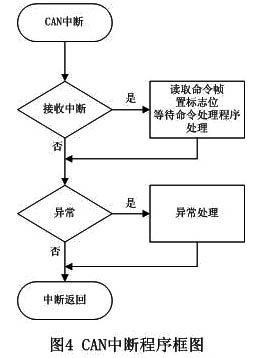
控制節點的CAN中斷程序的框圖如圖4所示。當節點接收到一條CAN幀,中斷處理程序讀出該命令,并置CAN命令接收標志,等待命令處理子程序的處理。
為了方便控制節點的安裝與調試,在主程序中特別加入了串口處理程序。使用者可以通過發送串口命令測試控制節點的各項功能,也可以通過串口上傳、下載控制方案。
3.2.3 現場可編程功能的實現
為了實現該系統的現場可編程功能,每一個控制節點都應該存儲本節點的照明回路與網絡中其他節點的傳感器的邏輯關系表。邏輯關系表的結構如下:

上表表示節點的各個智能照明模塊回路與系統中某一節點的的傳感器(包括本節點)的互連關系。如果表項中對應值為1,則表示對應的照明回路與傳感器相關聯,一旦傳感器有信號,相關的照明回路就會被打開。關系表中的各項的值可以隨時改變,并通過上位機或串口重新下載到存儲器中。
假設網絡中有N個控制節點,每一個節點中將會存儲N-1張關系表,對應于網絡中的其余N-1個節點。一旦某一節點在CAN上發送傳感器消息,其余的節點接收到該消息后就會從對應于發出消息的節點的關系表中查找與該傳感器關聯的照明回路并打開這些回路。這樣一旦有車輛進入停車場,該控制系統就會打開控制方案規定的所有的照明回路,實現照明的智能化。
4 結束語
通過對系統軟件、硬件的反復調試,該分布式燈光智能控制系統顯示出了傳統的停車場燈光控制系統無法比擬的優越性,可以有效減少小區地下停車場照明系統的安裝和維護費用,具有良好的應用前景和推廣價值。
相關資訊
- 樓宇建筑照明燈具種類及特性
- 消防應急照明和疏散指示系統IEC的定義及組成
- 關于備用照明與安全照明規定總匯及標準要求
- WL-LON-DRL0610照明繼電器模塊WL-LON-WG02網關
- BMW照明穩壓調控裝置技術說明 BWM/TE-30
- ATC9000M-II多回路天文控制器


最新產品
智能照明監控管理系統 智慧路燈監控終端

- 浙江巨川電氣科技有限公司基于城市路燈、景觀控制的智...
智能路燈控制器 GPRS經緯度天文鐘

- 巨川電氣智能路燈控制器采用計算機芯片管理:1.智能定時...
智能路燈監控終端 電纜防盜監測 電流電壓讀取

- 一、系統特點:智能路燈遠程監控系統軟件是巨川公司獨...
ZigBee 無線智能路燈解決方案 無線單燈控制器

- ZigBee 無線智能路燈解決方案 無線單燈控制器針對日益...
同類文章排行
- 巨川電氣--智能照明控制系統場景應用
- 巨川電氣智能照明開關模塊安裝與接線圖
- 智能照明控制器的接線圖
- 巨川電氣城市道路照明自控管理系統效益分析
- 智能照明模塊配電箱安裝接線圖圖
- 巨川電氣-KNX總線智能照明控制系統技術要求
- 巨川電氣--智能照明疏散系統型號選型
- 巨川電氣教你智能照明控制系統如何接線圖
- 巨川電氣-CAN總線與RS485總線系統通訊性能比較
- 消防應急照明和疏散指示系統解決方案

 掃一掃 關注我們
掃一掃 關注我們